徳島大学泌尿器科では、尿路生殖器悪性腫瘍に対して様々な方面からアプローチし、臨床応用可能な治療法の開発を目指し研究を行っています。
主な研究テーマは下記のとおりです。
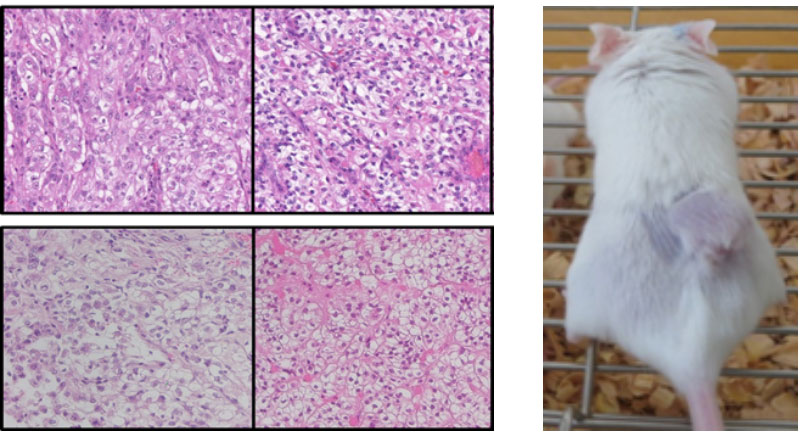
① 患者腫瘍移植モデル(Patient derived xenograft model:PDXモデル)を用いた希少癌に対する治療法の開発。
希少癌では、その発生頻度の低さゆえに有効な治療法が確立されていない場合が多々あります。当教室では、PDXモデルを用いたスクリーニングから希少癌に対する有効な治療薬の同定を目指しています。
② 癌進展における細胞間相互作用の役割の解明
線維芽細胞、脂肪細胞や血管内皮細胞と癌細胞の細胞間相互作用と癌進展の関連を明らかにし、細胞間相互作用を標的とした治療法の開発に取り組んでいます。
論文:Shintani et. al. Urology. 2017 Mar;101:169.e7-169.e13.
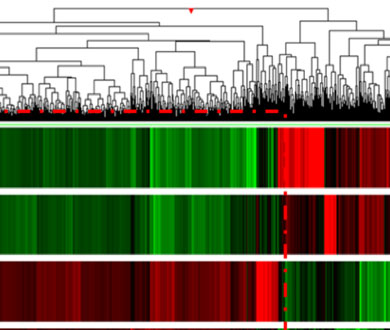
③ 癌特異的分子を標的とした治療法の開発
網羅的遺伝子発現解析の結果から癌細胞に特異的に発現する分子を同定し、その機能解析に基づいた治療法の開発を目指しています。
論文:Daizumoto et. al. Cancer Res. 2018 May 1;78(9):2233-2247.
Fukawa et.al Cancer Res. 2012 Nov 15;72(22):5867-77.
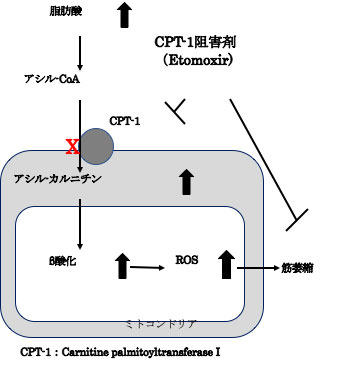
④ 癌悪液質における筋萎縮の発症機序の解明と治療法の開発
癌に伴って発症する筋萎縮の発症機序の解明を介して、未だに有効な治療法のない癌悪液質に対する新たな治療法の開発に取り組んでいます。
論文:Fukawa et. al. et. al. Nat Med. 2016 Jun;22(6):666-71.